Objectifs:
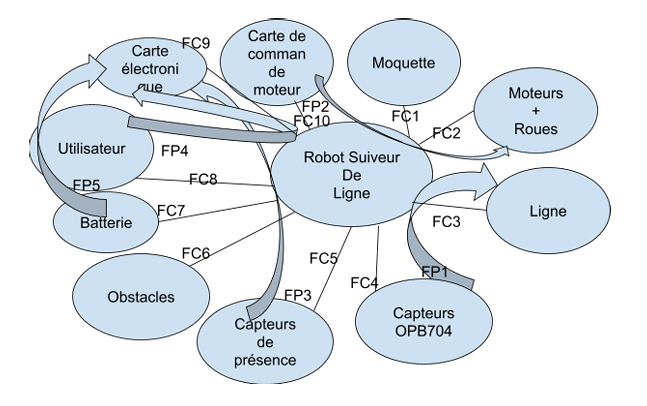
L'objectif de cette SAE est de concevoir un robot suiveur de ligne en logique câblée. Autrement dit, il
ne faut aucun microcontrôleur, tout doit se faire à partir de composants électroniques.
Le but de cette SAE est de mettre en pratique toutes les compétences en électronique, acquises lors de cette première année
de BUT GEII, ainsi que de mener un projet à sa fin.
L'idée, à la fin de cette SAE, est d'organiser un mini concours entre les différents groupes ayant conçu leurs propres robots, plus ou moins différents, en les faisant participer à des courses.
=> Afin d'organiser les différentes activités, les ressources d'équipes visant à organiser le bon déroulement du projet.
=> Afin de réaliser avec succés le projet en temps et en heures selon les objectifs visés.
Ordinateur, logiciel : GanttProject, Editeur de documents.
Documentations :
Cahier des charges à décider nous même
Pédagogique :
Cours de VE par un intervenant extérieur
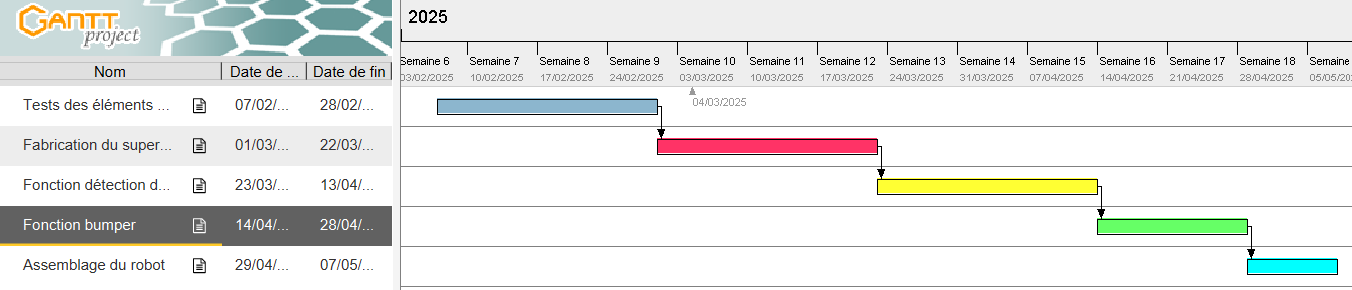
Télécharger le diagramme de Gantt
J'ai déjè été acteur dans plusieurs projets (animation, scientifique, personnel). Néanmoins, les cours de VE m'ont appris comment faire la gestion entière d'un projet pour en assurer au maximum son succès. Cette partie était donc très intéressante pour moi car c'est la première fois que je fais les analyses fonctionnelles du besoin d'un projet, et j'en vois donc l'importance avant même de commencer celui-ci.
=> Afin de vérifier le bon fonctionnement de chaque composants et de voir comment leurs fonctionnements.
Ordinateur, Oscilloscope, Multimètre, Alimentation stabilisée.
Documentation :
Datasheets des composants (à trouver).
Pédagogique :
Cours/TP d'électronique

Cette partie a été simple puisqu'il fallait seulement vérifier le bon fonctionnement des composants en se référant à leurs datasheets et en comparant les valeurs théoriques aux valeurs obtenues en pratique.
=> Afin de vérifier la tension aux bornes de la batterie d'alimentation du robot.
Si la tension est supérieure à 11.7V, le robot peut démarrer la course, sinon il n'y est pas autorisé afin de protéger la batterie.
Composants électroniques (résistance, condensateur, AOP, transistor mosfet...), Poste à souder, étain, ordinateur, logiciel de simulation : SimulIDE
Pédagogique :
Cours/TP d'électronique
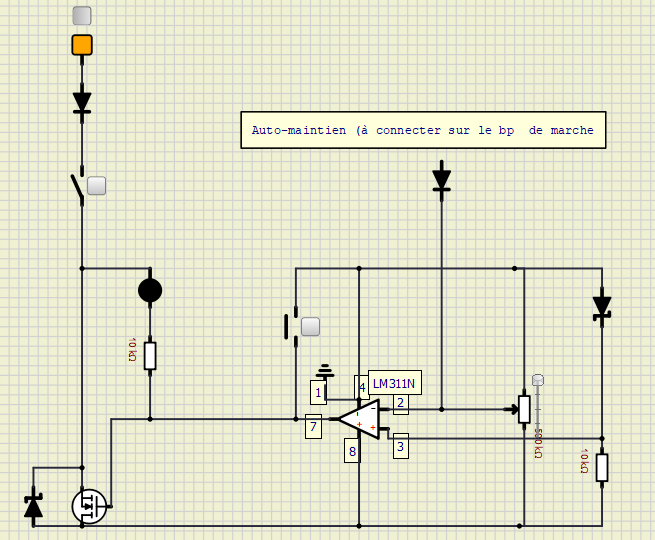
Pour réaliser le superviseur de batterie, on a eu des explications théoriques sur le fonctionnement de celui-ci. Au début, la compréhension de ce circuit est assez compliquée puisqu'il s'agit de l'un de nos premiers schéma électronique 'complexe' mettant en oeuvre plusieurs composants dont certains, jamais appris leurs fonctionnements en cours. Néanmoins, en faisant la simulation sur logiciel, du superviseur, il est assez facile à en comprendre son fonctionnement.
=> Afin de récupérer un signal continu de 6V en sorti de celui-ci en fonction de s'ils captent la ligne ou non.
Ordinateur, logiciel de simulation, oscilloscope, multimètre, alimentation stabilisée
Documentation :
Schéma exemple d'une utilisation des capteurs OPB704 (trouvé sur un forum en ligne)
Pédagogique :
Cours/TP d'électronique, physique appliquée
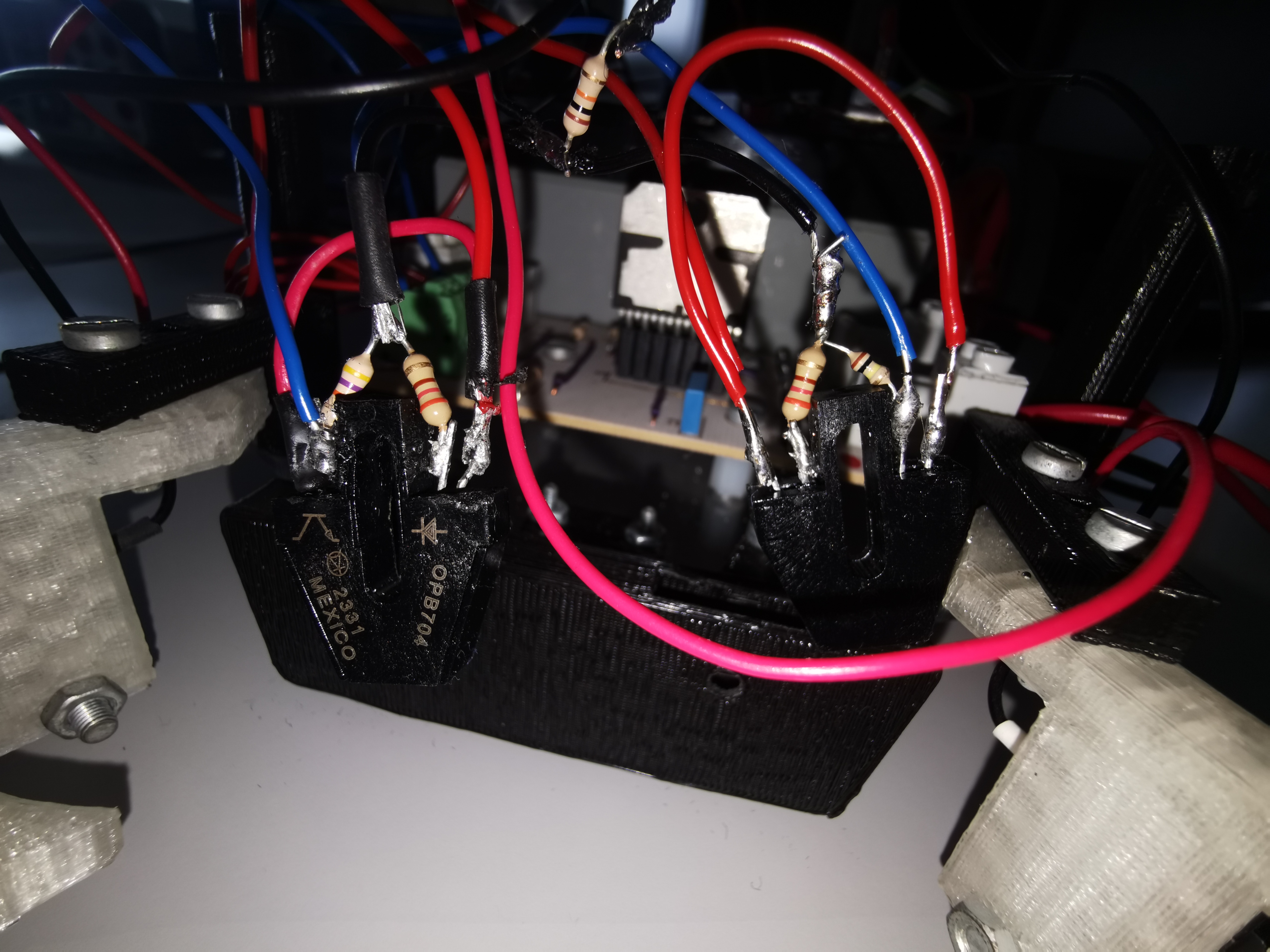
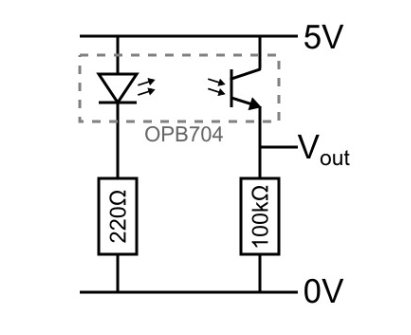
Pour câbler les capteurs, j'ai vérifier le fonctionnement du schéma pris sur un forum pour vérifier si j'avais le signal souhaité en sorti du capteur, puis j'ai testé et soudé sur les broches des capteurs.
=> Afin de piloter les moteurs par un signal PWM avec un rapport cyclique pré-défini.
Poste à souder, étain, composants (résistances, condensateurs, AOP, LEDs), carte imprimée.
Documentation :
Schéma de l'oscillateur astable (fait sur logiciel : SimulIDE)
Pédagogique :
Cours/TP d'électronique
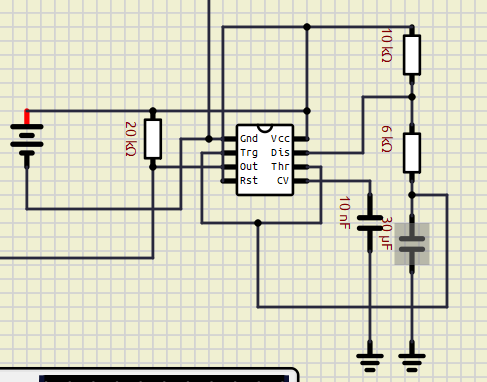
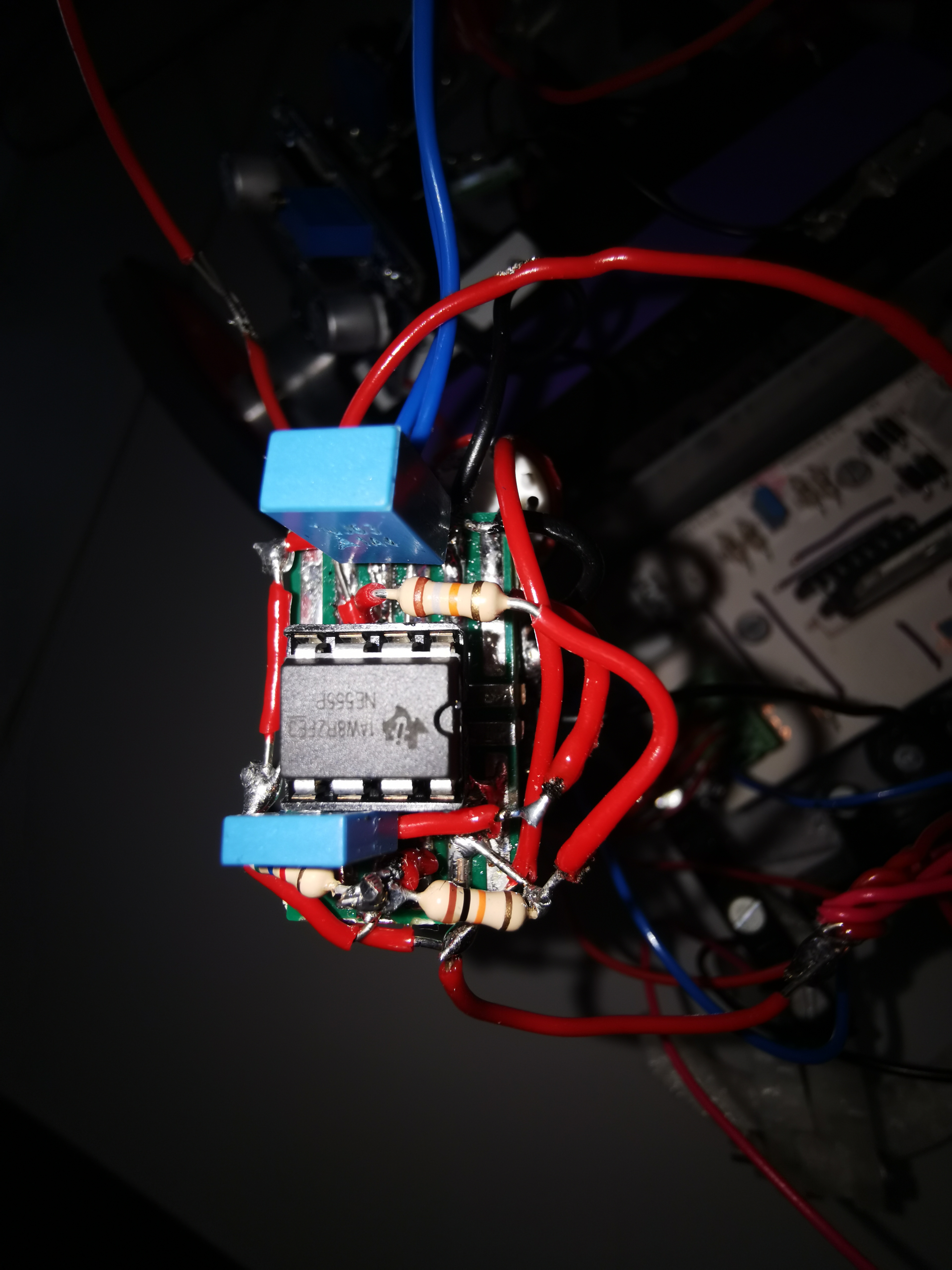
Réaliser l'oscillateur astable a été très amusant pour moi, car je me suis lancé le défi de concevoir toutes les cartes aussi miniatures que possible afin de gagner en place et en poids sur le robot. Cependant, à la suite du projet, nous enlèverons cet astable pour le remplacer par un signal continu de 6V gagnant ainsi en rapidité.
=> Afin d'arrêter le robot si celui-ci touche un obstacle par l'un de ses bumpers.
2 capteurs de présence, ordinateur, poste à souder, étain, logiciel de simulation, breadboard, composants (résistance, portes logiques...).
Documentation :
Schéma électronique fait sur simulIDE, schéma pour réaliser une bascule RS à partir de portes logiques NAND
Pédagogique :
Cours/TP d'électronique, physique appliquée
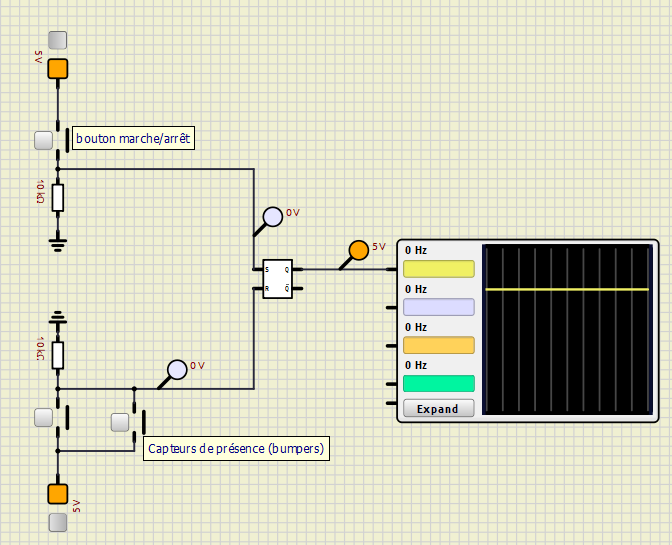
La réalisation de la fonction d'arrêt par les bumpers a été assez simple pour moi, ayant appris la fonctionnalité des bascules, cela ne m'a pas posé de problème, cependant il m'a fallu créer une bascule rs à partir de portes NAND.
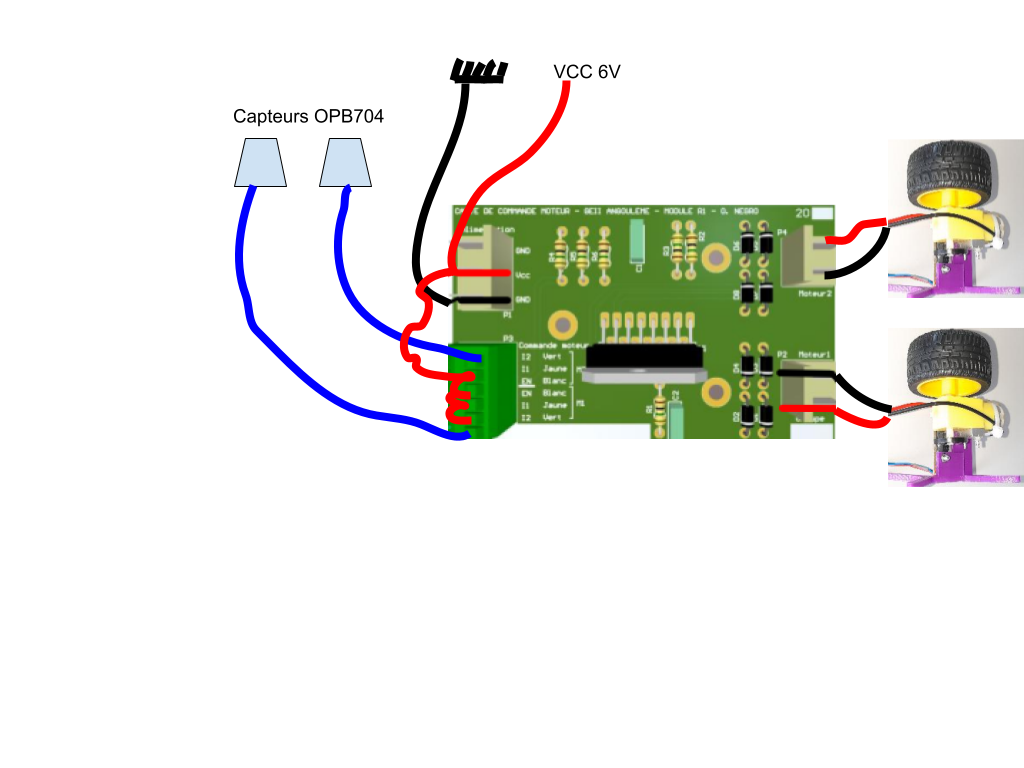
=> Afin de piloter les 2 moteurs en fonction des capteurs de ligne.
Ainsi, il faut connecter les bons câbles sur la bonne pin du bornier de la
carte de commande moteur (pont en H).
Ordinateur, carte de commande moteur (pont en H)
Documentation :
Tous les tests et documents réalisés dans la première SAE 'carte de commande moteur'
Pédagogique :
Cours/TP d'électronique, SAE
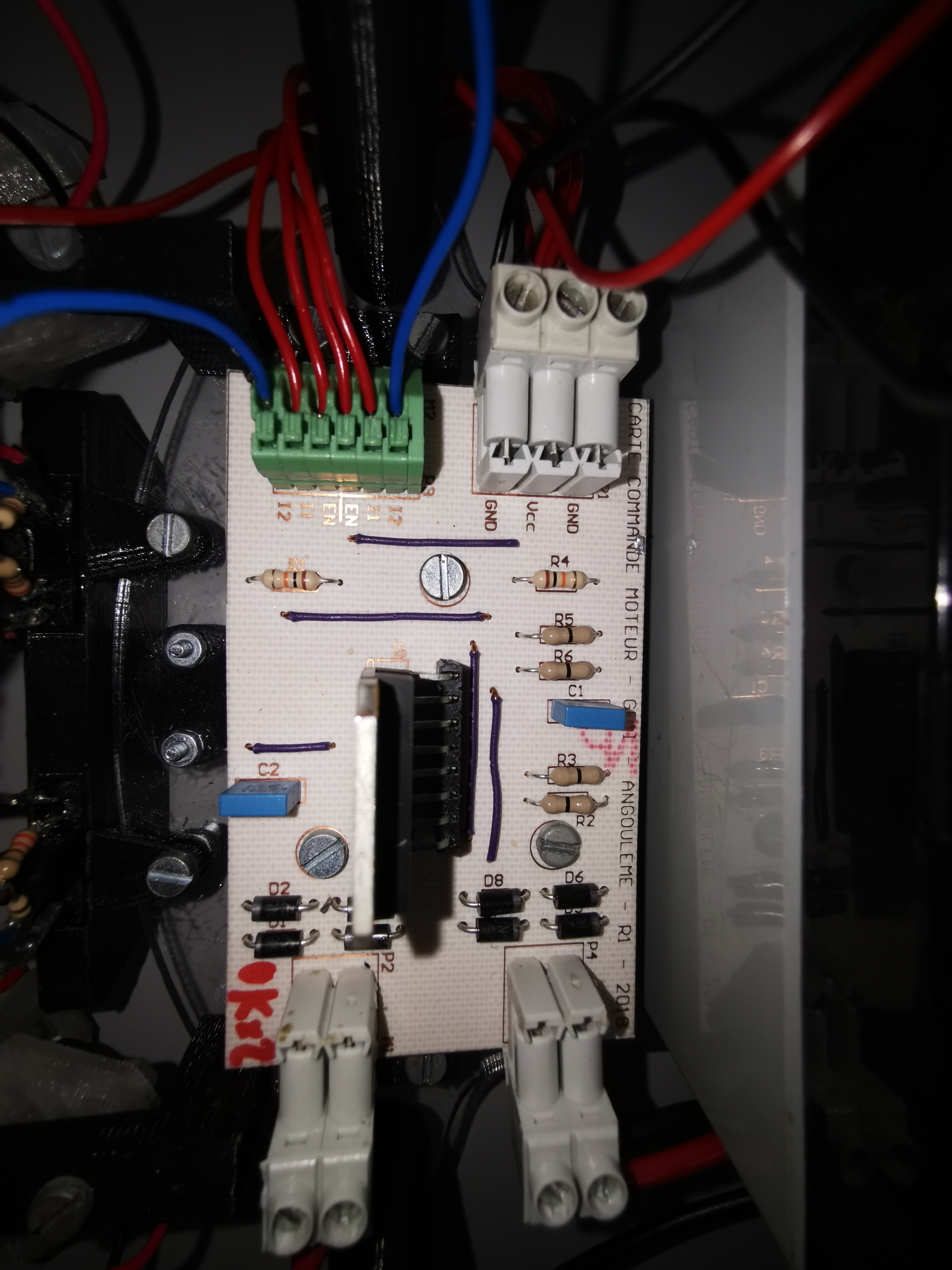
Réaliser cette partie a été simple puisque l'on a déjà vu le fonctionnement de la carte de commande moteur (pont en H)
dans la première SAE.
Après quelques tests réalisés sur les entrées de la carte de commande moteur (pont en H), j'ai connecté
les capteurs sur l'entrée I2 pour chaque moteurs (câbles de commande), et le VCC sur les autres pins réglant ainsi le sens de
rotation du moteur et le rapport cyclique à 100%.
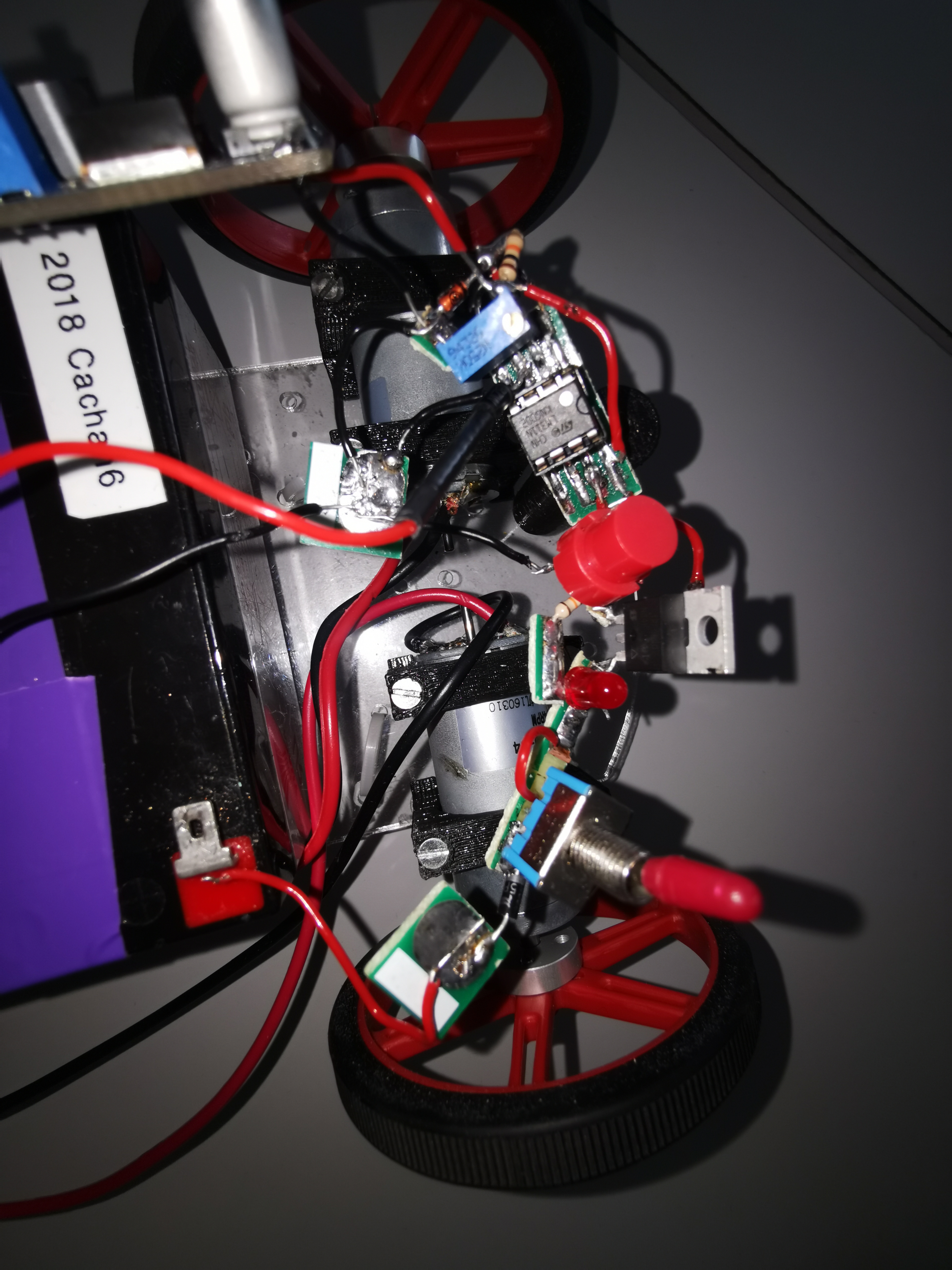
=> Afin de faire fonctionner entièrement le robot avec les objectifs fixés au début du projet.
Ordinateur, logiciel de simulation, poste à souder, étain, fonctions soudées sur des petites cartes
Documentation :
Schémas électroniques de chaque fonctions, réalisés tout au long de cette SAE
Pédagogique :
Cours/TP d'électronique, SAE
Cette partie est assez complexe au début puisque les circuits ne sont pas forcéments adaptés pour être liés à un autre. Cependant, ça m'a permis de voir l'importance de réaliser des cartes électroniques sur un logiciel de conception adapté afin de faire toutes les fonctions sur une seule carte électronique. Néanmoins, j'ai quand même réussi à relier toutes les fonctions entre-elles.
=> Afin de vérifier son bon fonctionnement et s'il respecte les objectifs fixés.
=> Afin de modifier si besoin la procédure de fonctionnement du robot.
Robot avec toutes les fonctions assemblées, batterie, piste de course (moquette bleue, ligne blanche)
Documentation :
Procédure de fonctionnement du robot (faite au début du projet par les objectifs fixés, et à modifier si besoin)
Pédagogique :
Cours/TP d'électronique, SAE
Cette dernière partie est pour moi la meilleure et la plus satisfaisante puisque l'on peut voir le rendu final de son projet. De plus, après quelques petits réglages, mon robot a eu le fonctionnement attendu. C'est à ce moment là du projet, que l'on peut être fier du travail réalisé.
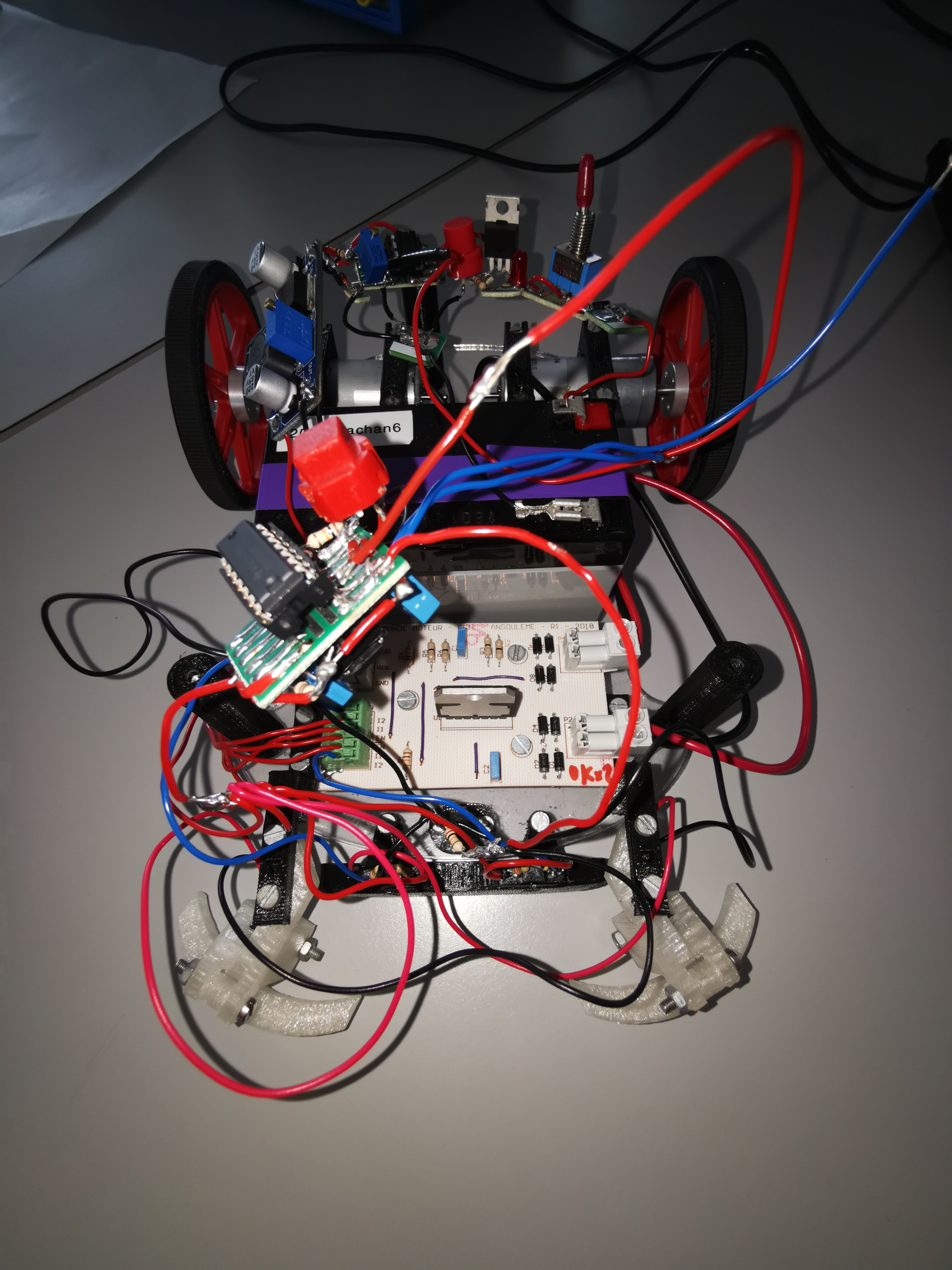
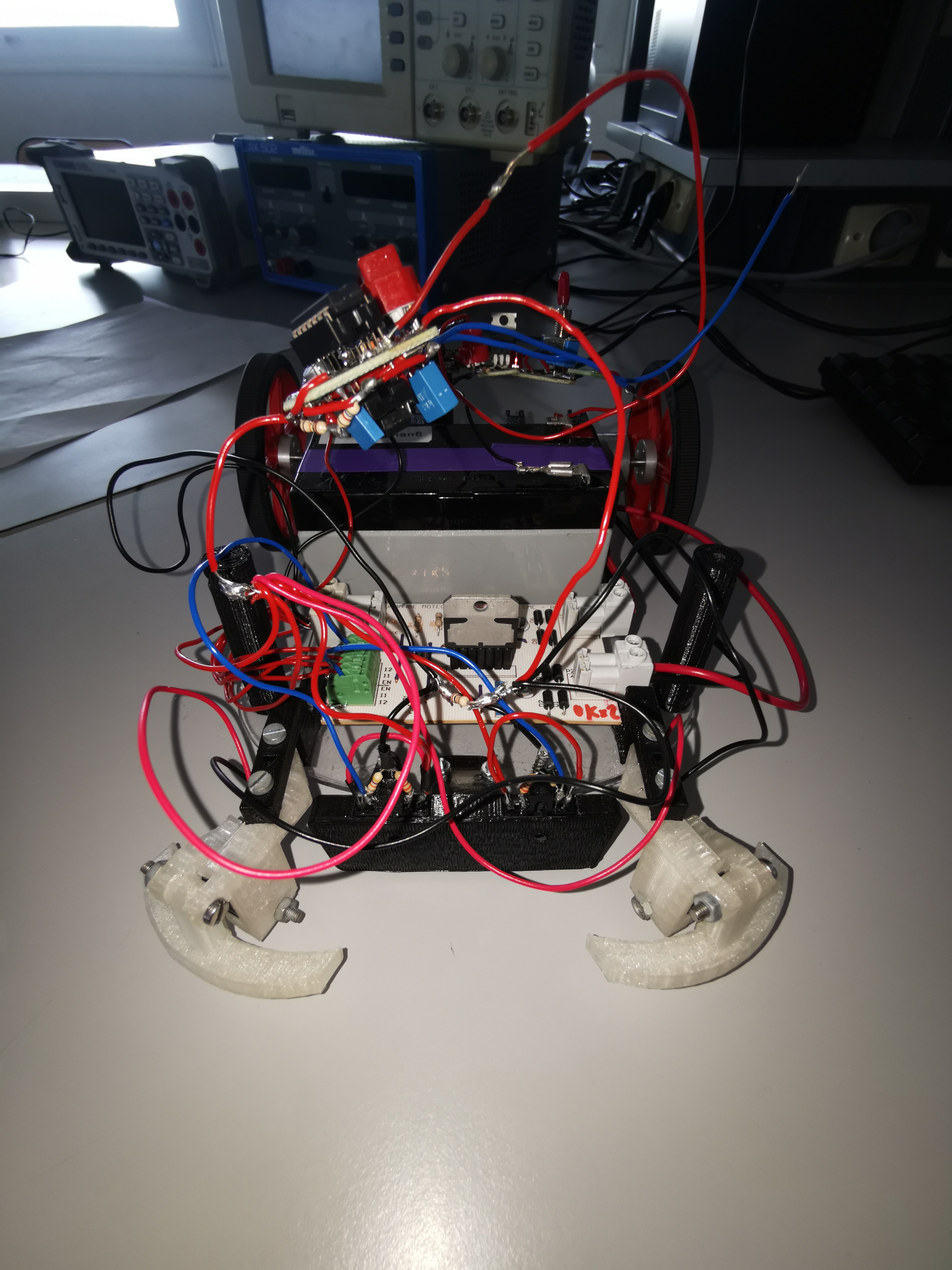
La SAE, réaliser un robot suiveur de ligne est pour moi la meilleure de ma première année en GEII, puisqu'en autonomie, nous devons créer un robot capable
de suivre une ligne, à l'aide de nos connaissances acquises pendant l'année et à notre capacité de chercher la bonne information au bon endroit.
En effet, cette SAE m'a beaucoup apporté en termes de connaissances en électronique, j'ai donc appris tout en m'amusant et en étant passionné.
Pour conclure, je suis fier d'avoir mené un projet comme celui-ci, de plus, je suis fier du résultat obtenu à la fin.